外科手术机器人及高精度力传感技术团队

团队负责人:史超阳
天津大学英才计划长聘教授, 国家青年特聘专家
研究方向与成果
外科手术机器人及高精度力传感技术团队由天津大学机械学院史超阳教授领衔,现有省部级教授1人,该团队长期致力于手术机器人方向研究,主要包括经自然腔道微创手术机器人、显微外科手术器人、骨科手术机器人、血管内介入式手术机器人与智能传感技术等,部分研究成果已通过离体动物实验验证。团队发表英文SCI/EI论文90余篇,并连续两届获得中国机器人及人工智能大赛全国一等奖。
团队利用机器人辅助技术,突破传统徒手超显微手术精准操作尺度有限、稳定性差和感知能力受限等困难,成功开发了显微外科手术机器人系统。该系统具有高精度、高稳定性和感知能力强的操作优势,能够有效解决机器人末端器械精准灵巧操作、提高辅助手术安全性等技术问题。
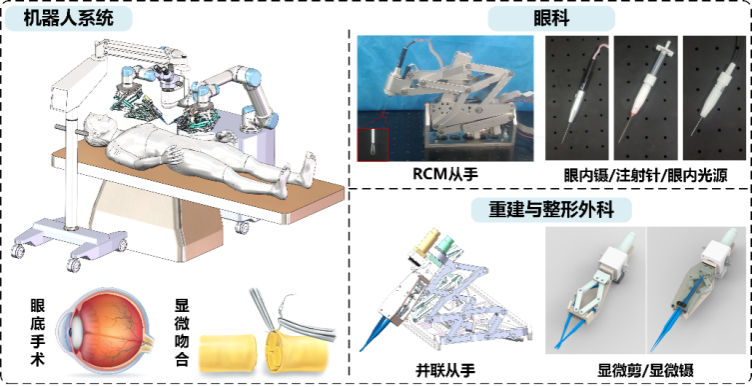
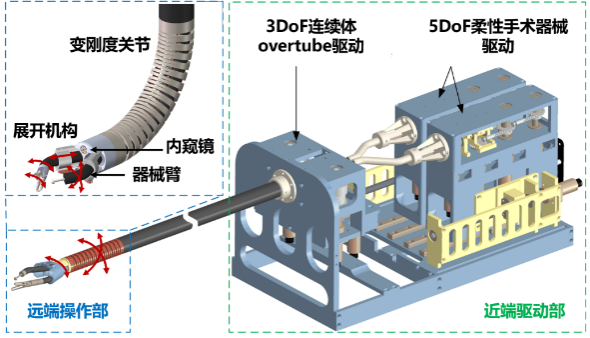
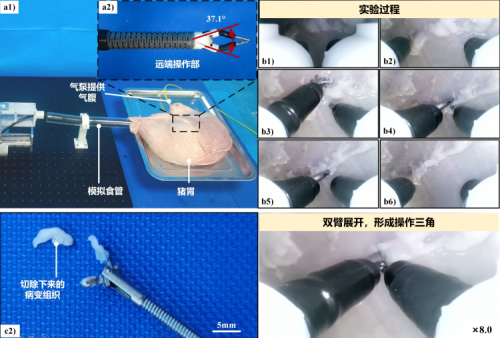
目前,团队面向消化道与呼吸道早期癌症治疗,已经开发了三种不同类型的具有刚柔耦合特征的柔性内镜手术机器人系统,并进行了动物实验验证;面向显微外科手术诊疗领域精准操作的需求,开发出两种基于并联机构的显微外科手术机器人系统,分别用于眼科、血管与神经修复和重建等复杂精细手术操作;针对各领域手术机器人力传感信息缺失的难题,开发出多款微型高精度力传感器,实现mN级别力感知。