研究方向与成果
骨科手术与康复医疗机器人团队由天津大学机械学院孙涛教授领衔,现有国家级/省部级教授2人,助理研究员2人,硕博士研究生8人,该团队专注于机器人结构设计理论和医疗机器人等关键技术领域,其中多项技术已通过活体动物实验和临床试验的验证,取得了27项国家发明专利,并获得中国好设计金奖、中国产学研合作创新成果一等奖、天津市技术发明一等奖、中国专利优秀奖,入选中国智能制造十大科技进展。
团队聚焦于辅助诊断、方案制定、智能监测及机器人手术等术中诊疗和术后个性化康复技术,目前已成功研发出成熟的骨科手术机器人系统、骨科手术导航系统和骨科康复机器人系统等平台化产品,有效解决传统骨科手术创伤大、可视化程度低、复杂术式难普及的行业痛点。通过引入该产品,可显著降低手术风险,缩短骨折手术治疗周期,延缓、减少并发症发生,同时精准量化实施骨折复位轨迹与康复锻炼方案,大幅提高复位精度,并为创伤性骨折患者节省巨大医疗费用。
团队研发的高精度、广泛适用且治疗成本亲民的骨科手术与康复医疗机器人系统适用于多个领域(如磨切、焊接、装配、手术和康复),目前医疗器械产品注册证已进入终审(待批)阶段,并与河北医科大学第一医院、天津医院等合作完成多例临床试验。此外,团队与高校、研究院和企业密切合作,技术专利转化已逾百万。
团队依托天津大学机构理论与装备设计教育部重点实验室和浙江国际创新设计与智造研究院,针对传统骨科手术创伤大、可视化程度低、复杂术式难普及的行业痛点,运用智能机器人、多模影像融合、智能诊疗、量化康复等关键核心技术,开发一种具有精度高、适用范围广且治疗成本低的骨科手术与康复医疗机器人系统,并将逐步推出骨科手术机器人系统、骨科手术导航系统和骨科康复机器人系统等平台化产品。
团队获得天津市技术发明一等奖,中国产学研合作创新成果一等奖,中国智能制造十大科技进展,中国好设计金奖,中国机械工程学会青年科技成就奖,中国专利优秀奖,6次最佳论文,1篇中国科协优秀论文。
在骨科医疗机器人方面,发表学术论文 20 余篇,申请/授权国家发明专利 27 项、PCT专利 10 项、美国专利 5 项、软著 7 项(手术复位软件实施专利转化100 万元)。
骨折手术与康复机器人
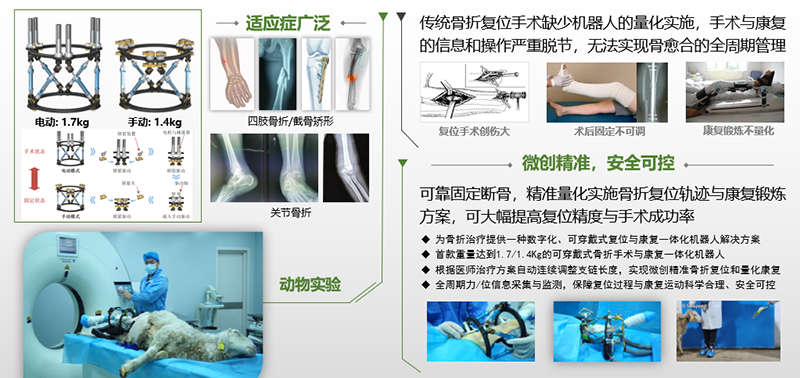
传统骨折复位手术缺少机器人的量化实施,手术与康复的信息和操作严重脱节,无法实现骨愈合的全周期管理。团队为骨折治疗提供一种数字化、可穿戴式复位与康复一体化机器人解决方案。可靠固定断骨,精准量化实施骨折复位轨迹与康复锻炼方案,可大幅提高复位精度与手术成功率。
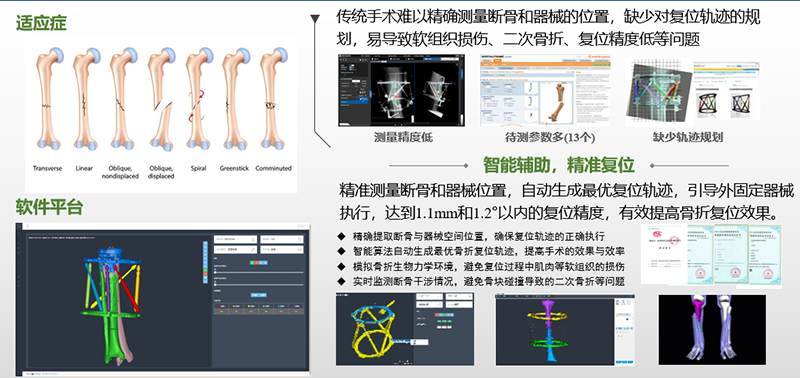
骨折复位轨迹规划软件
传统手术难以精确测量断骨和器械的位置,缺少对复位轨迹的规划,易导致软组织损伤、二次骨折、复位精度低等问题。该软件可以精准测量断骨和器械位置,自动生成最优复位轨迹,引导外固定器械执行,达到1.1mm和1.2°以内的复位精度,有效提高骨折复位效果。
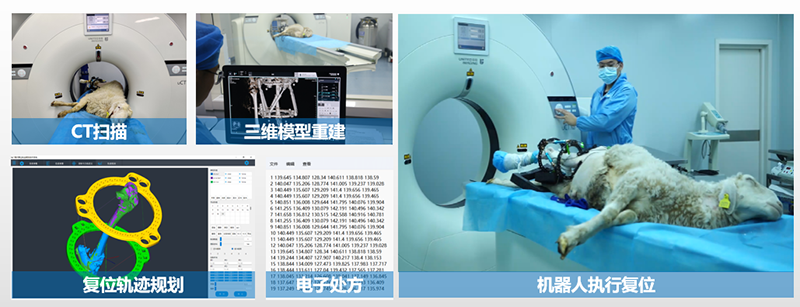
产品应用演示: